

摘要:伺服定位完成信号实例解析是关于伺服系统定位完成后所发出的信号的具体分析。在自动化控制系统中,伺服系统完成指定位置定位后,会发出相应的信号以通知其他设备或系统。解析这一信号实例,有助于了解伺服系统的定位精度、响应速度及工作稳定性。通过对信号的产生、传输和处理过程的研究,可以优化伺服系统的性能,提高生产效率和设备寿命。
本文目录导读:
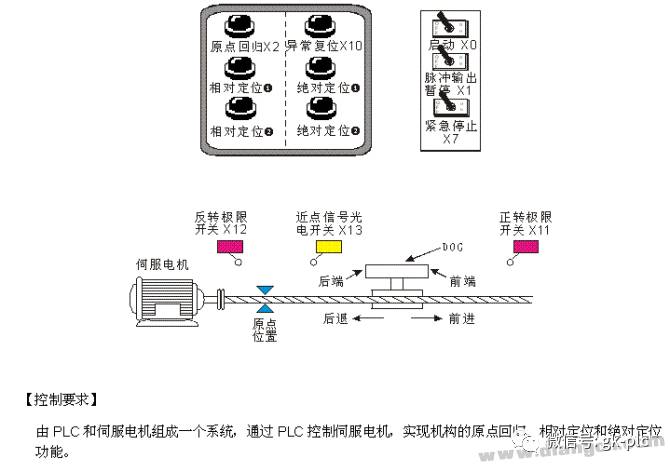
伺服定位系统在现代工业、制造业及自动化控制领域中扮演着至关重要的角色,伺服系统通过精确控制电机转动,以实现精准的定位操作,伺服定位完成信号则是反映伺服系统完成定位任务的重要反馈信号,本文将结合实际案例,详细介绍伺服定位完成信号的工作原理、应用场景及实现方法。
伺服定位系统概述
伺服定位系统主要由控制器、驱动器、执行机构(电机)和反馈装置等组成,控制器发出指令,驱动器根据指令驱动电机转动,执行机构实现精确的定位操作,反馈装置则将执行机构的实际位置信息反馈给控制器,以便控制器对执行机构进行精确控制,伺服定位完成信号则是反馈装置在定位任务完成后发出的信号,用于通知控制器定位任务已完成。
伺服定位完成信号实例
以某工厂生产线上的物料搬运机器人为例,该机器人需要通过伺服系统精确控制其机械臂的运动,以实现物料抓取、搬运和放置等任务,当机器人接收到抓取物料的指令后,伺服系统会驱动机械臂电机转动,使机械臂运动到指定位置,在此过程中,反馈装置会实时监测机械臂的实际位置,并将位置信息反馈给控制器,当机械臂到达目标位置时,反馈装置会发出伺服定位完成信号,通知控制器定位任务已完成。
伺服定位完成信号的工作原理
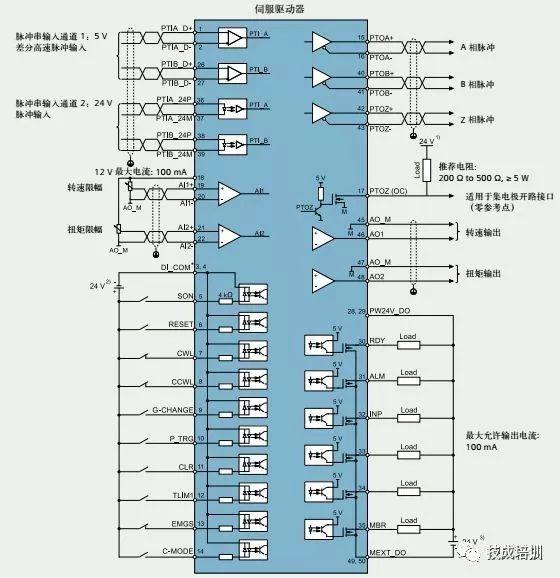
伺服定位完成信号的工作原理基于位置反馈原理,在伺服系统中,反馈装置(如编码器、光电开关等)实时监测执行机构(电机)的实际位置,并将位置信息反馈给控制器,控制器将目标位置与实际位置进行比较,根据比较结果调整电机的转动,以确保执行机构能够精确到达目标位置,当执行机构到达目标位置时,反馈装置会发出一个特定的电信号(即伺服定位完成信号),通知控制器定位任务已完成。
应用场景及实现方法
1、应用场景
伺服定位完成信号广泛应用于物料搬运、机械加工、数控机床、印刷包装等领域,以数控机床为例,当工件需要精确加工时,伺服系统需要精确控制机床的运动,以确保工件加工精度,在机床完成工件加工后,伺服定位完成信号会通知控制系统加工任务已完成,以便进行下一步操作。
2、实现方法
(1)硬件实现:在伺服系统中,通过编码器、光电开关等反馈装置实时监测电机的实际位置,并将位置信息反馈给控制器,当电机到达目标位置时,反馈装置发出一个电信号,即伺服定位完成信号。
(2)软件实现:在控制器中编写相应的程序,以识别和处理伺服定位完成信号,当反馈装置发出信号时,控制器通过程序识别该信号,并执行相应的操作(如停止电机运动、进行下一步操作等)。
案例分析
以某物料搬运机器人为例,该机器人需要精确控制机械臂的运动,以实现物料的抓取和搬运,在机器人运行过程中,控制器发出指令驱动机械臂电机转动,反馈装置实时监测机械臂的实际位置,并将位置信息反馈给控制器,当机械臂到达目标位置时,反馈装置发出伺服定位完成信号,控制器接收到信号后,识别该信号并停止机械臂电机的运动,然后进行下一步操作,通过这种方法,机器人可以精确地执行物料搬运任务。
本文介绍了伺服定位完成信号实例的相关知识,包括伺服定位系统概述、伺服定位完成信号实例、工作原理、应用场景及实现方法等,通过实际案例的分析,可以更好地理解伺服定位完成信号在工业自动化控制领域中的应用,在实际应用中,需要根据具体的需求和场景选择合适的硬件和软件实现方法,以实现精确的定位操作。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...